
{kind=link}
Sharpa Demonstrates Its Humanoid Robot’s Capabilities
Engineers at Sharpa Robotics have demonstrated a humanoid robot system capable of performing the complex task of peeling an apple by coordinating the movements of both hands.
The SharpaNorth robot supports 63 degrees of freedom and uses two SharpaWave manipulators. This capability is enabled by the new MoDE-VLA (Mixture-of-Dexterous-Experts Vision-Language-Action) AI architecture, which allows the system to combine visual and tactile data during manipulation.
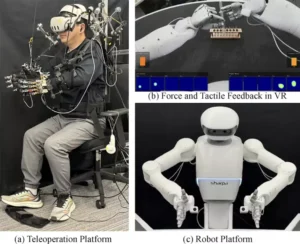
For training, engineers used the IMCopilot system. The operator in the exoskeleton controlled large arm movements, while fine object rotations were captured and fed to the algorithm through a shared autonomy mode and a control pedal.
Across four test tasks — peeling an apple, assembling gears, rearranging pipes, and connecting a charger — the model achieved an overall success rate of 34%. However, the average task completion rate reached 73%, and the success rate for apple peeling specifically improved from 0% in the base model to 30%.